Publications
2026
- SenSys 2026
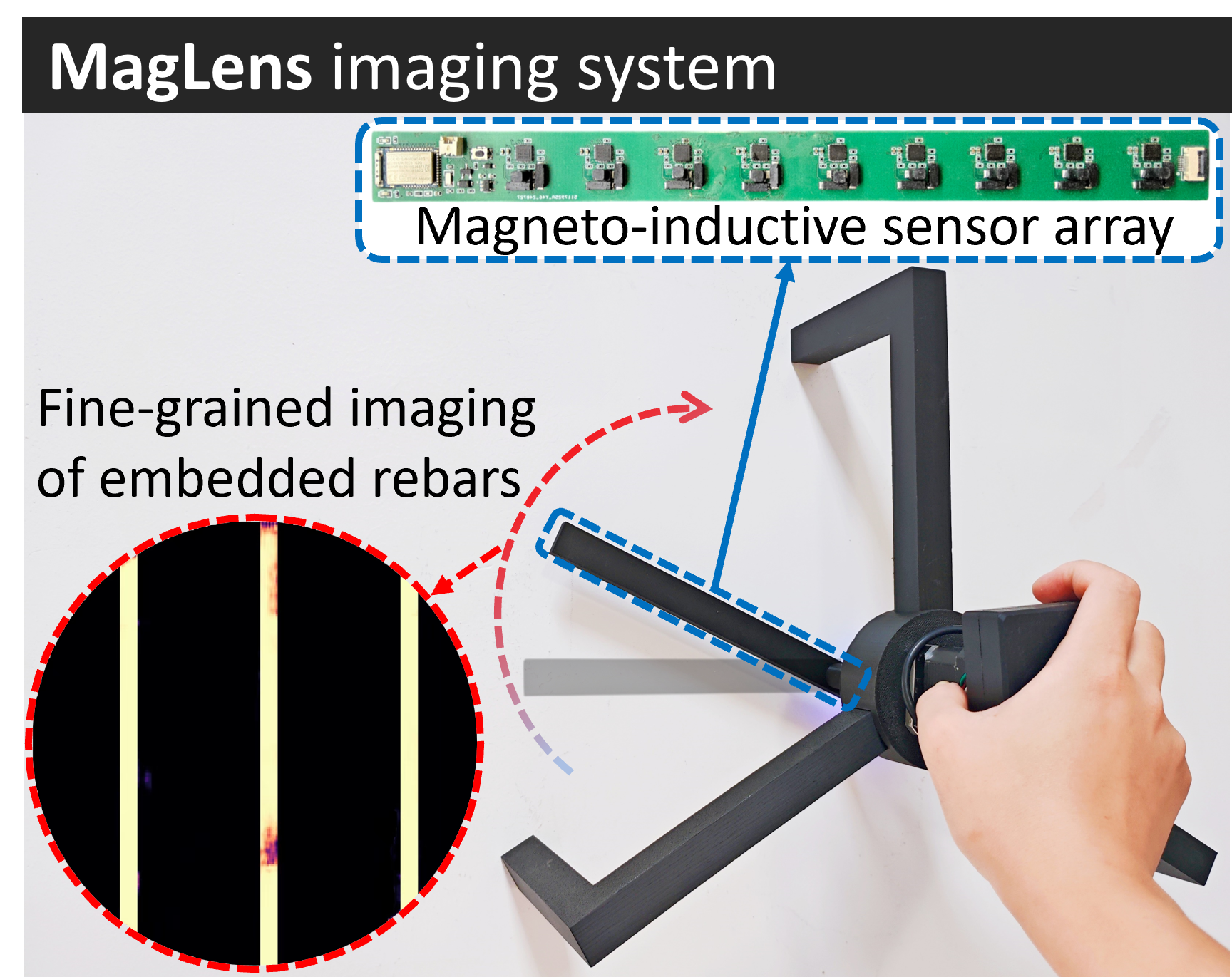 MagLens: Bringing Mobile, Fine-Grained Imaging to Ferrous Building StructuresJike Wang, Yasha Iravantchi, Mingke Wang, and 4 more authorsIn Proceedings of the 2026 ACM/IEEE International Conference on Embedded Artificial Intelligence and Sensing Systems, , 2026
MagLens: Bringing Mobile, Fine-Grained Imaging to Ferrous Building StructuresJike Wang, Yasha Iravantchi, Mingke Wang, and 4 more authorsIn Proceedings of the 2026 ACM/IEEE International Conference on Embedded Artificial Intelligence and Sensing Systems, , 2026Fine-grained inspection of ferrous structures, such as steel rebars and iron pipes, is essential for ensuring structural health/integrity. However, existing non-destructive imaging techniques often suffer from coarse spatial resolution, high operational costs, and limited mobility support, hence severely restricting their practical deployment. For example, ground-penetrating radar (GPR), constrained by its operating wavelength, cannot resolve sub-centimeter features or recover fine contours of embedded ferrous structures. We present MagLens, a mobile and cost-effective imaging system for inspecting ferrous structures, such as rebars, metal studs, and iron pipes. Leveraging high-sensitivity commercial-off-the-shelf (COTS) magnetometers, MagLens introduces two key designs: (1) a novel synthetic aperture of magnetic sensors (SAMS) that combines a compact hardware, a rotation-based scanning module to enhance spatial coverage and an optional pre-magnetization module for extending the sensing range; and (2) a physics-informed neural imaging pipeline trained on synthetic data, enabling robust contour reconstruction and depth estimation with minimal effort. By capturing precise cross-sectional contour variations, MagLens can achieve corrosion assessment. We evaluate MagLens in diverse real-world settings using rebars as a representative structural material, achieving high-fidelity imaging that captures fine-grained geometries, e.g., bending, intersecting, and parallel layouts. MagLens’ efficacy is also tested on iron pipes, metal studs, and irregular objects, e.g., garden shears, not seen during the training phase. Results show that MagLens achieves contour reconstruction errors within 1 mm and depth estimation errors below 0.5 cm.
@inproceedings{wang2026maglens, author = {Wang, Jike and Iravantchi, Yasha and Wang, Mingke and Sample, Alanson and Shin, Kang Geun and Wang, Xinbing and Chen, Dongyao}, title = {MagLens: Bringing Mobile, Fine-Grained Imaging to Ferrous Building Structures}, year = {2026}, isbn = {9798400723094}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3774906.3802749}, doi = {10.1145/3774906.3802749}, booktitle = {Proceedings of the 2026 ACM/IEEE International Conference on Embedded Artificial Intelligence and Sensing Systems}, pages = {347–361}, numpages = {15}, keywords = {Magnetic Sensing; Magnetic Imaging; Structure Inspection}, location = { }, series = {SenSys '26}, } - NDSS 2026
 DualStrike: Accurate, Real-time Eavesdropping and Injection of Keystrokes on Commodity KeyboardsXiaomeng Chen, Jike Wang, Zhenyu Chen, and 3 more authorsIn Network and Distributed Systems Security (NDSS) Symposium, 2026
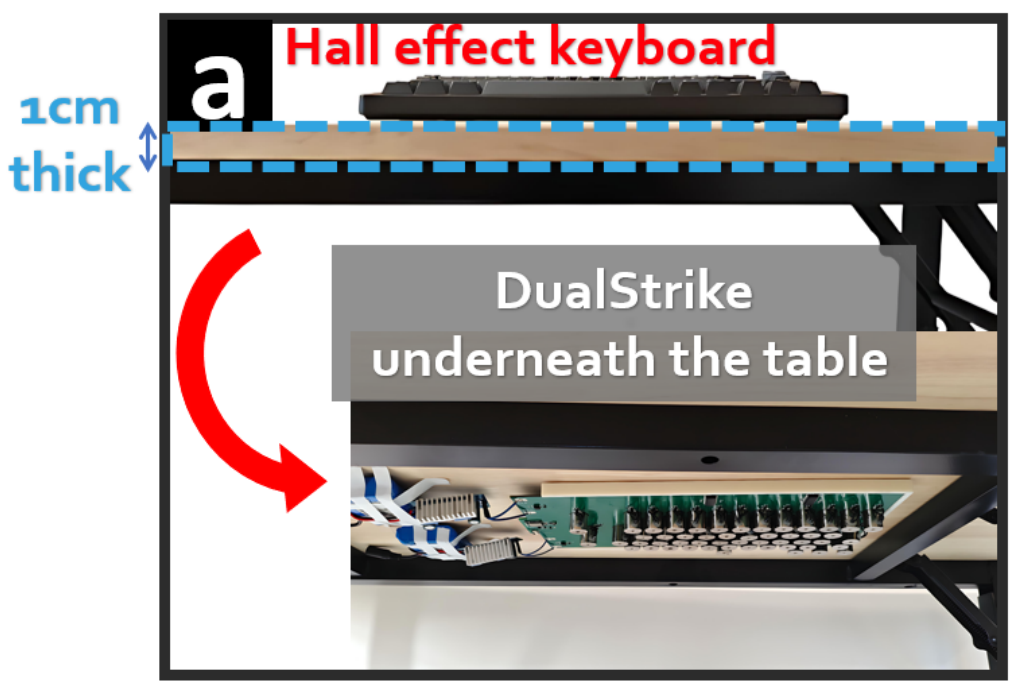
DualStrike: Accurate, Real-time Eavesdropping and Injection of Keystrokes on Commodity KeyboardsXiaomeng Chen, Jike Wang, Zhenyu Chen, and 3 more authorsIn Network and Distributed Systems Security (NDSS) Symposium, 2026We discover that enabling both eavesdropping and non-invasive, per-key injection is viable on keyboards, in particular, the fast-emerging commodity Hall-effect keyboards. This paper introduces DualStrike, a new attack system that allows attackers to remotely listen to victim input and control any key on a Hall-effect keyboard. This capability opens doors to severe attacks (e.g., file deletion, private key theft, and tampering) based on the victim’s input and context, all without requiring hardware or software modifications to the victim’s computer. We present several key innovations in DualStrike, including a novel, compact electromagnet-based hardware design for high-frequency magnetic spoofing, a synchronization-free attack scheme, and a magnetometer-based listening mechanism using commercial off-the-shelf components. Our real-world experiments demonstrate that DualStrike can reliably compromise arbitrary keys across six recent Hall-effect keyboard models. Specifically, DualStrike achieves over 98.9% keystroke injection accuracy across all tested models. In an end-to-end test, the eavesdropping module achieves a high listening accuracy (i.e., above 99%). To improve the robustness of DualStrike, we implement a calibration algorithm to account for keyboard displacement, allowing it to maintain 98.5% injection accuracy even with offsets up to 4 cm. We also identified DualStrike’s immunity to existing magnetic shielding mechanisms and proposed a novel shielding approach for Hall-effect keyboards.
@inproceedings{chen2026dualstrike, title = {DualStrike: Accurate, Real-time Eavesdropping and Injection of Keystrokes on Commodity Keyboards}, author = {Chen, Xiaomeng and Wang, Jike and Chen, Zhenyu and Chen, Qi Alfred and Wang, Xinbing and Chen, Dongyao}, booktitle = {Network and Distributed Systems Security (NDSS) Symposium}, year = {2026}, }
2024
- MobiCom 2024
 Polaris: Accurate, Vision-free Fiducials for Mobile Robots with Magnetic ConstellationJike Wang, Yasha Iravantchi, Alanson Sample, and 3 more authorsIn Proceedings of the 30th Annual International Conference on Mobile Computing and Networking, Washington D.C., DC, USA, 2024
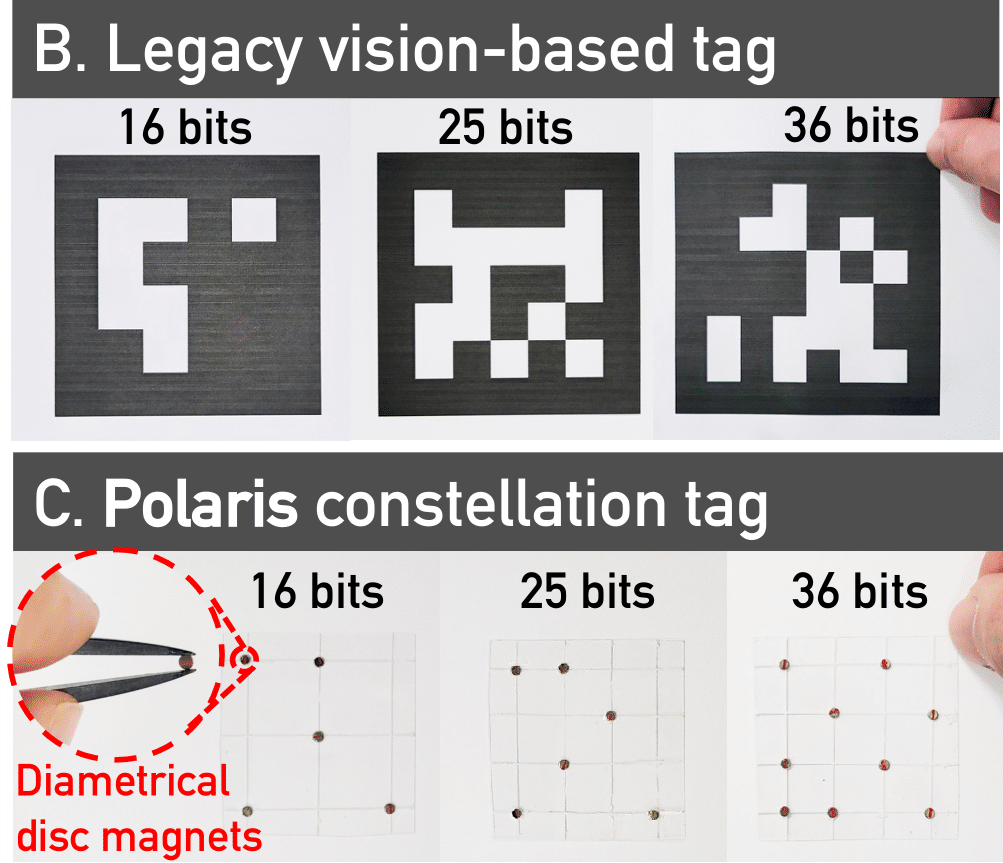
Polaris: Accurate, Vision-free Fiducials for Mobile Robots with Magnetic ConstellationJike Wang, Yasha Iravantchi, Alanson Sample, and 3 more authorsIn Proceedings of the 30th Annual International Conference on Mobile Computing and Networking, Washington D.C., DC, USA, 2024Fiducial marking is indispensable in mobile robots, including their pose calibration, contextual perception, and navigation. However, existing fiducial markers rely solely on vision-based perception which suffers such limitations as occlusion, energy overhead, and privacy leakage.We present Polaris, the first vision-free fiducial marking system, based on a novel, full-stack magnetic sensing design. Polaris can achieve reliable and accurate pose estimation and contextual perception, even in NLOS scenarios. Its core design includes: (1) a novel digital modulation scheme, Magnetic Orientation-shift Keying (MOSK) that can encode key information like waypoints and coordinates with passive magnets; (2) a robust and lightweight magnetic sensing framework to decode and localize the magnetic tags. Our design also equips Polaris with three key features: sufficient encoding capacity, robust detection accuracy, and low energy consumption. We have built an end-to-end system of Polaris and tested it extensively in real-world scenarios. The testing results have shown Polaris to achieve an accuracy of up to 0.58 mm and 1° in posture estimation with a power consumption of only 25.08 mW.
@inproceedings{wang2024polaris, author = {Wang, Jike and Iravantchi, Yasha and Sample, Alanson and Shin, Kang G. and Wang, Xinbing and Chen, Dongyao}, title = {Polaris: Accurate, Vision-free Fiducials for Mobile Robots with Magnetic Constellation}, year = {2024}, isbn = {9798400704895}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3636534.3690711}, doi = {10.1145/3636534.3690711}, booktitle = {Proceedings of the 30th Annual International Conference on Mobile Computing and Networking}, pages = {1560–1574}, numpages = {15}, keywords = {magnetic sensing, fiducial system, magnetometer}, location = {Washington D.C., DC, USA}, series = {ACM MobiCom '24}, } - AdaAIoTSys 2024
 Demo: Implementation and Benchmark of Magnetic Tracking on Mobile PlatformsZhenyu Chen, Jike Wang, and Dongyao ChenIn Proceedings of the 2024 Workshop on Adaptive AIoT Systems, Minato-ku, Tokyo, Japan, 2024
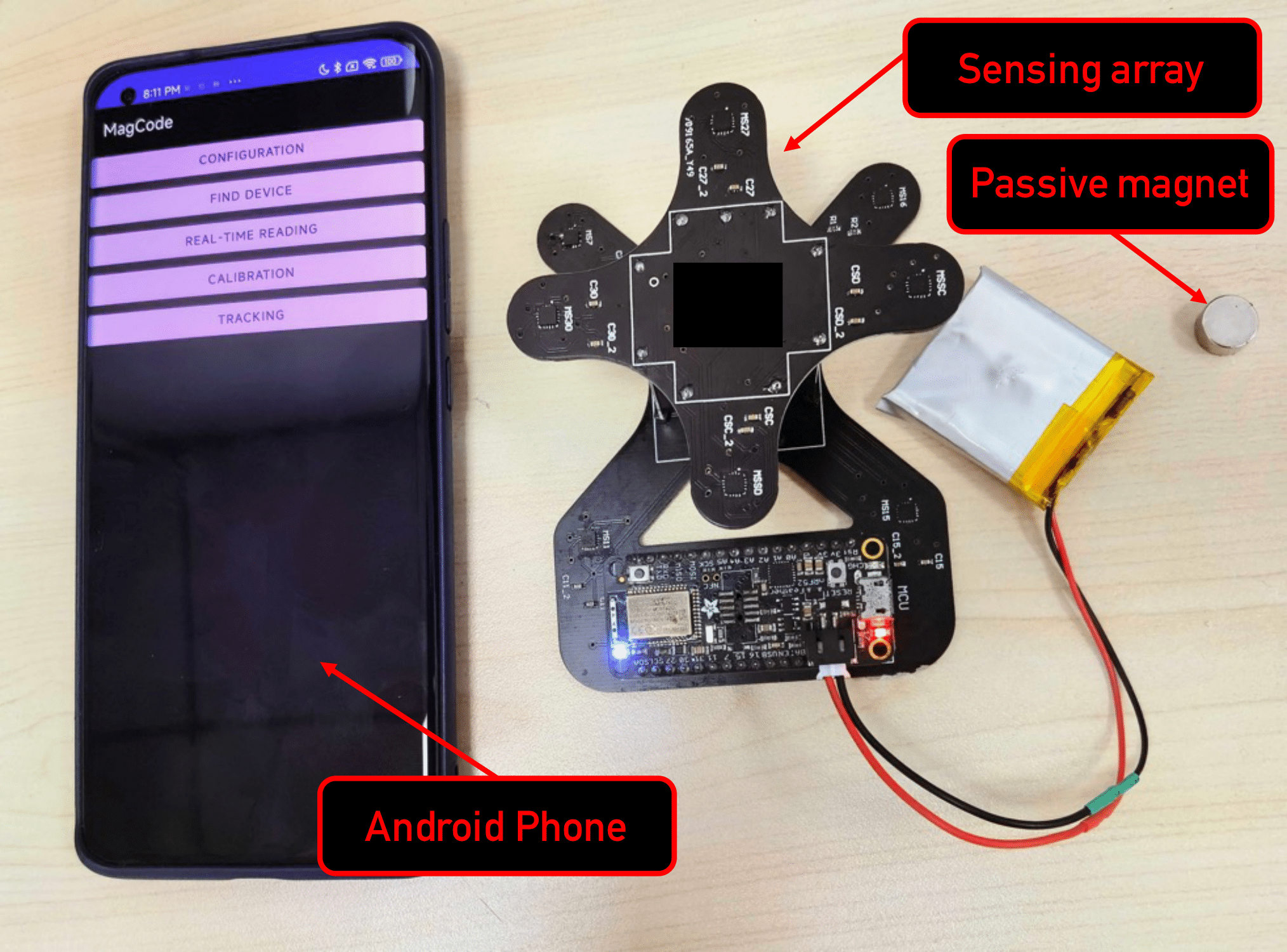
Demo: Implementation and Benchmark of Magnetic Tracking on Mobile PlatformsZhenyu Chen, Jike Wang, and Dongyao ChenIn Proceedings of the 2024 Workshop on Adaptive AIoT Systems, Minato-ku, Tokyo, Japan, 2024Magnetic sensing is a promising approach for enabling high-accuracy and fine-grained tracking. Recent research has highlighted the superior performance of magnetic tracking in various subtle motion sensing tasks, such as hand and joint tracking. These tasks typically rely on computational resources available on laptops. However, the feasibility of migrating magnetic tracking techniques to mobile platforms, such as smartphones with limited computing power and energy capabilities, remains uncertain. This demo demonstrates the successful deployment of magnetic tracking techniques on commodity smartphones. Our implementation is benchmarked on a Commercial Off-The-Shelf (COTS) Android smartphone. Empirical studies indicate that our implementation on mobile platforms is both energy-efficient and highly effective.
@inproceedings{wang2024demo, author = {Chen, Zhenyu and Wang, Jike and Chen, Dongyao}, title = {Demo: Implementation and Benchmark of Magnetic Tracking on Mobile Platforms}, year = {2024}, isbn = {9798400706646}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3662007.3663885}, doi = {10.1145/3662007.3663885}, booktitle = {Proceedings of the 2024 Workshop on Adaptive AIoT Systems}, pages = {21–22}, numpages = {2}, keywords = {Magnetic tracking, Mobile computing, Ubiquitous computing}, location = {Minato-ku, Tokyo, Japan}, series = {AdaAIoTSys '24}, } - SenSys 2023
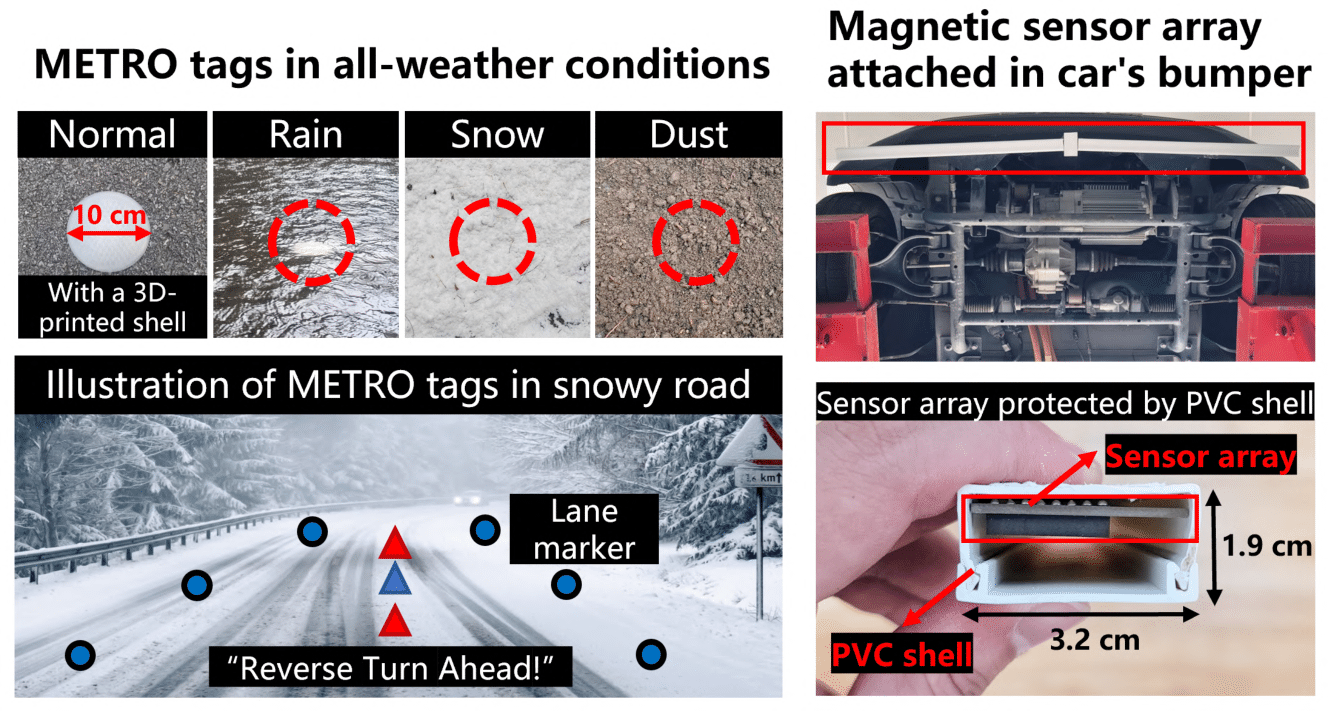 METRO: Magnetic Road Markings for All-weather, Smart RoadsJike Wang, Shanmu Wang, Yasha Iravantchi, and 6 more authorsIn Proceedings of the 21st ACM Conference on Embedded Networked Sensor Systems, Istanbul, Turkiye, 2024
METRO: Magnetic Road Markings for All-weather, Smart RoadsJike Wang, Shanmu Wang, Yasha Iravantchi, and 6 more authorsIn Proceedings of the 21st ACM Conference on Embedded Networked Sensor Systems, Istanbul, Turkiye, 2024Road surface markings, like symbols and line markings, are vital traffic infrastructures for driving safety and efficiency. However, real-world conditions can impair the utility of existing road markings. For example, adverse weather conditions such as snow and rain can quickly obliterate visibility.We propose a novel MagnETic ROad marking system (METRO) for robust recognition of road markings at low cost and high deployability. METRO pairs (a) easily deployable passive magnetic road markings with (b) an automotive-grade magnetic sensing framework that detects and interprets these markings. The design of METRO addresses several real-world challenges, such as mitigating the impact of magnetic disturbances, lowering deployment costs, and enhancing the durability of magnetic tags. On-road field tests of METRO demonstrate an overall accuracy of over 96% in interpreting various road markings in adverse conditions with less cost (only 0.17 per meter) than traditional road markings (0.21–7.70 per meter). Our field evaluation of METRO over one month demonstrates the practicality and robustness of METRO in real-world settings. Specifically, we observed no performance degradation in the METRO sensor array and no damage or demagnetization to METRO’s magnetic tags.
@inproceedings{wang2023metro, author = {Wang, Jike and Wang, Shanmu and Iravantchi, Yasha and Wang, Mingke and Sample, Alanson and Shin, Kang G. and Wang, Xinbing and Zhou, Chenghu and Chen, Dongyao}, title = {METRO: Magnetic Road Markings for All-weather, Smart Roads}, year = {2024}, isbn = {9798400704147}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3625687.3625809}, doi = {10.1145/3625687.3625809}, booktitle = {Proceedings of the 21st ACM Conference on Embedded Networked Sensor Systems}, pages = {280–293}, numpages = {14}, keywords = {magnetic sensing, all-weather road markings, magnetometer}, location = {Istanbul, Turkiye}, series = {SenSys '23}, }